- ホーム >
- 研究内容
- 超高速パラレルメカニズム NINJA
本研究では、生産能率向上に有用な超高速動作ロボットの開発を目指して、超高速パラレルメカニズムNINJAの開発を行っています。NINJAは100[G]の動作生成を目標とした6自由度の高速パラレルメカニズムであり、8つのモータを導入することで冗長な駆動系を構築し、現在までに80[G]の動作生成に成功しています。
100[G]の動作生成を実現するためには、高加速動作によってロボットに大きな負荷がかかってしまったり、モータ同士が干渉して高精度な制御ができなかったりするという問題を解決する必要があります。本研究では、この2つの問題を解決し、NINJAの超高加速動作を実現させる手法を探究しています。- 高速・高精度ワイヤメカニズム
産業界では、高速・高精度な動作が可能で、かつ動作範囲の大きいロボットが求められています。本研究では、こうした要求を満たすようなワイヤ駆動ロボットの開発を行っています。
このロボットはワイヤ駆動であるため、アクチュエータ部をロボットの可動部から離れた位置に設置でき、動作範囲を大きくすることが可能です。また、冗長駆動機構を導入するとともに内部自由度を利用することで、高速・高精度な動作を実現できることが期待されます。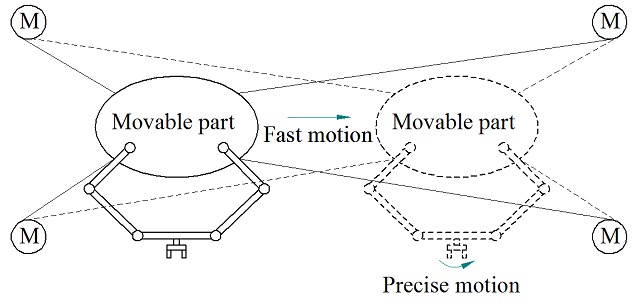
- 並列型力覚センサ
並列型力覚センサとは、それ単体で力を測定できるセンサを複数個並列に配置することで、全体として一つのセンサを構成したものです。これにより、使用者が用途に応じて配置方法を変更することでセンサの定格を大きくできるという、従来のセンサでは不可能だったことが可能となります。
また、力覚センサの良し悪しは、負荷した力を精確に測定できるかどうかによって決まり、これを「感度」という指標を使って定量的に考えますが、本研究では定格を大きくできることに加え、センサを設置する環境の剛性が未知でも、感度を落とさずに力を測定できるような並列型力覚センサの開発に取り組んでいます。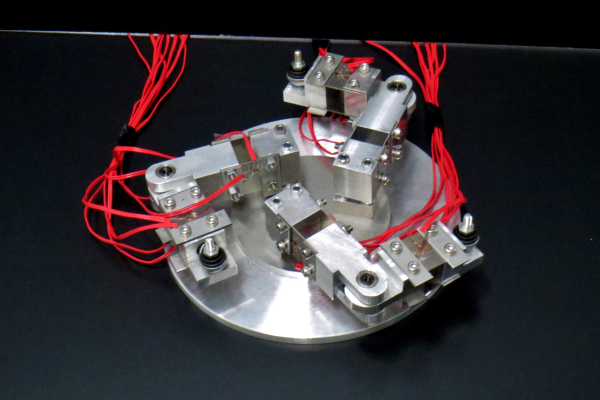
- 電子部品実装機
電子部品実装機には高速性が強く求められますが、ここでの高速化は移動時間の短縮化であり、さらに繰り返し動作を行う動作領域は小さいため、実際には高加速性が重要となります。ところが、主要メーカの電子部品実装機の多くは、XYテーブルを基にした類似の機構と、同様の性能を持つモータを使用しているため、高速性において大きな差異が生じにくいのが現状です。主要メーカがXYテーブルを基にした機構を採用している理由は、高速性とともに強く求められる高精度性のためですが、新たな機構により高速性を大きく向上させることができれば、スピード競争の膠着状態を打破することができると期待されます。
本研究では、高速パラレルメカニズムの研究に基づき、電子部品実装機の高加速性を実現するためのパラレルメカニズムの開発に取り組んでいます。- コンプライアント動作生成可能な冗長駆動関節
人-ロボット共存社会へ向けた取り組みがなされている昨今、ロボットと人が衝突した際にも安全性を確保することが最重要課題となっています。これを実現するための一手法として、環境から力が加わった際に柔らかいバネのような動作(コンプライアント動作)を生成することが考えられます。
我々は高周波帯域までコンプライアント動作を実現可能とすることを主たる目的とし、制御によってコンプライアント動作を生成できる、2台のアクチュエータを有する冗長駆動関節(RDJ-DA)と、大きな可変コンプライアンス幅を実現することを主たる目的とし、機械粘弾性要素によってコンプライアント動作を生成できる可変バネ・ダンパを有する冗長駆動関節(RDJ-VSD)の開発に取り組んでいます。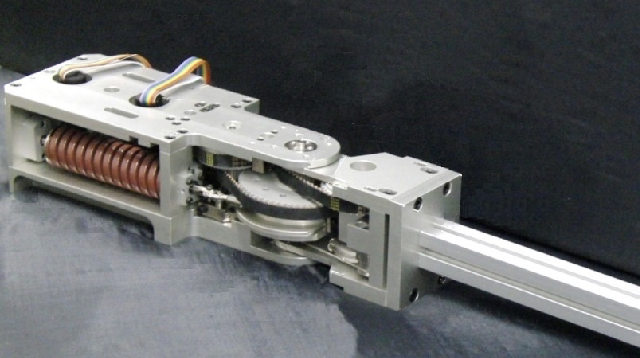
- 磁気浮上型リハビリロボット
本研究では、磁気浮上機構を手先に取り付けた上肢リハビリ用ロボットアームの開発を行っています。リハビリロボットでは接触時に人の安全を確保する必要がありますが、このロボットアームは上肢と接触する部分を磁気浮上機構で浮上させることで、接触時に加わり得る衝撃に対してアーム部が素早く反応できなくても、磁気浮上機構が素早く対応し、人の安全を確保することができます。
先行研究にはバネなどを用いたものがありますが、磁気浮上機構では手先に現れる慣性、摩擦をより小さくすることができます。また、電磁石を導入することで手先部における望みの特性を変化させることができるため、リハビリを効果的に行えることが期待されます。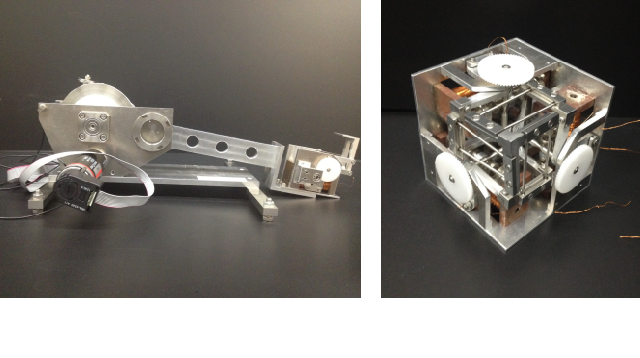
- 脳波計測による運動意図検出
脳卒中患者は、後遺症として身体の一部が麻痺してしまうことがあります。しかし、早期にリハビリを行えば、運動機能が回復すると言われています。麻痺の症状が軽度で、かつ筋電位が計測できる場合には、筋肉に直接電気信号を与えて筋を収縮させ、運動機能の回復訓練を行う機能的電気刺激(FES)等のリハビリ手法があります。一方、麻痺の症状が重度で筋電がうまく計測出来ない患者を対象としたリハビリ手法は多くありません。
本研究では、そうした脳卒中患者のリハビリにおいて患者の運動を適切なタイミングでアシストし、運動機能の回復訓練を効率的に行えるようにするため、患者の脳波から運動意図生成のタイミングを時間精度よく検出する方法を開発しています。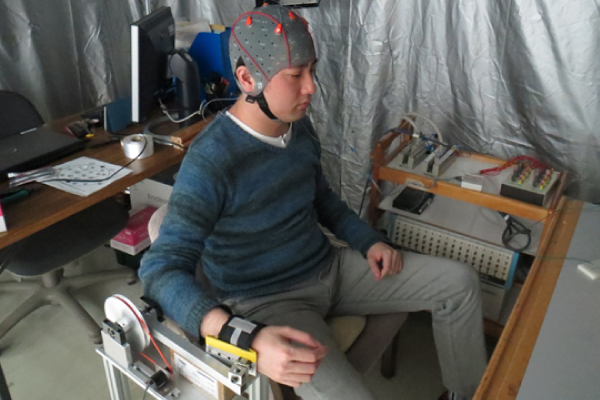
- 脳波駆動リハビリロボット
超高齢化社会の我が国においては、脳卒中の発生率やその結果寝たきりとなる可能性の高さから、脳卒中罹患後の患者に対して運動機能の回復訓練を効率的に行うためのリハビリロボットシステムの開発が重要な課題となっています。
本研究では、そのようなリハビリロボットシステムの実用化を目指し、冗長駆動関節の機構を発展させた冗長駆動マニピュレータ(RDM)の開発を行っています。このロボットは、脳卒中罹患後の患者に対して上肢の運動機能の回復訓練を行うためのものであり、患者の上肢を優しく誘導することが可能です。また、このロボットを脳波計測による運動意図検出システムと統合することによって、患者の運動意図生成のタイミングに合わせて上肢の屈伸運動を補助することができ、効率的な運動機能回復訓練を実現することができると期待されます。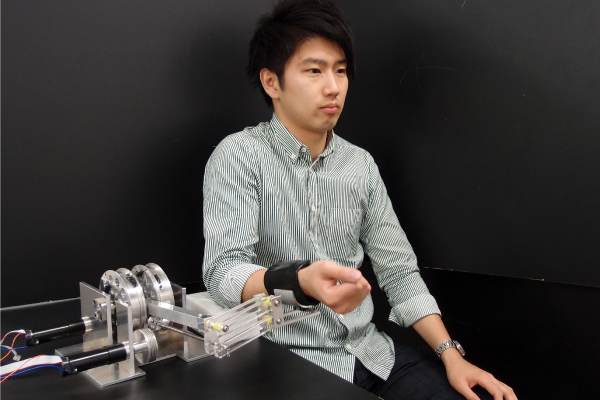
- エスコート型リハビリロボット
我が国では、麻痺した身体のリハビリテーションを必要としている脳卒中患者が多く存在します。しかし、リハビリを行う理学療法士の人数に限りがあるのが現状です。こうした背景から、本研究では理学療法士の負担の軽減を目的とした、上肢エスコート型リハビリロボットの開発を行っています。
このリハビリロボットの特徴としては、回復効果が高く見込まれる脳卒中発症直後の急性期(病室内のリハビリ)から維持期(自宅でのリハビリ)まで使用可能とするためにポータブルであること、三次元動作および腕姿勢の保持が実現できること、肩位置を拘束せず、座位が安定しない急性期の患者も使用可能であることが挙げられます。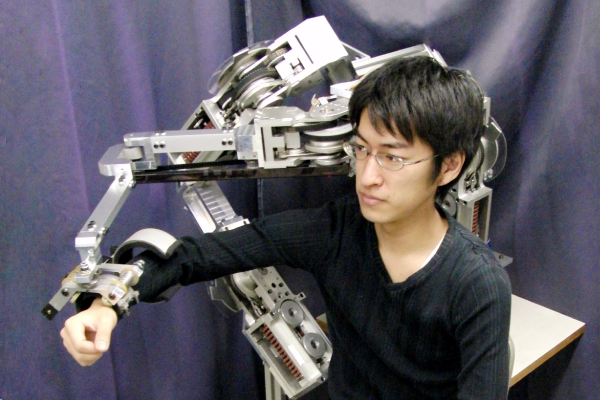
- じょくそう予防クッション
寝たきりの人や長時間車いすなどに座る人には、体とベッドや座面などとの接触部分で皮下の血流が阻害され、皮下組織が壊死してしまう、じょくそう(床ずれとも呼ばれる)という疾患が起こりやすくなっています。じょくそう予防を目的とした従来のクッションでは、クッション内部に使用されている空気あるいは液体の充填部の構造のため、荷重の分散が十分に実現できなかったり、沈み込み過ぎて底付きしてしまったりするという問題があります。
こうした背景から、本研究では、荷重分散と底付き防止をともに実現できるような、空気とゲルを併用したセル構造体と呼ばれるクッション材と、複数個のセル構造体によって構成されるじょくそう予防クッションの開発を行っています。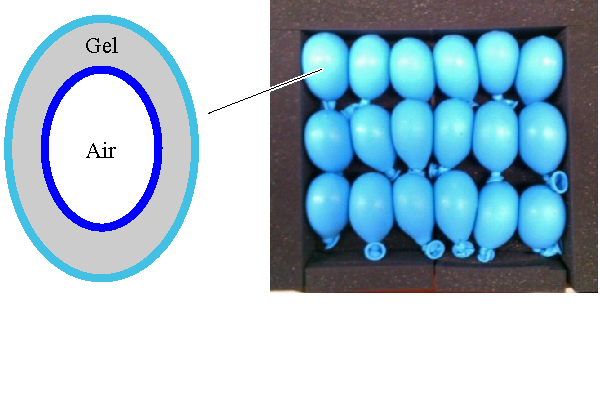
- 腰痛防止のための介護支援装置
我が国の急激な高齢化の進行に伴い、介護者のニーズに合わせた福祉機器の開発が重要な課題となっています。特に、介護現場におけるベッド・車椅子間の移乗動作に代表されるような抱え上げ動作を含む移乗動作の介助において、介護者の腰に非常に大きな負担がかかることにより腰痛を引き起こすことが大きな問題となっています。
本研究では、介護者が軽量の装着具から直接パワーアシストを受けることにより、リフトなどに比べ、被介護者に対して自由な介護動作を実現できるような介護支援用パワーアシスト装置の開発を行っています。
- 自立支援パワーアシスト装置
近年、我が国では急激な高齢化が進んでおり、加齢または障害により移乗動作を行うことが困難な人の割合が多くなっています。このような人が移乗するためには、介護者による介護が必要となりますが、介護者にとって移乗動作の補助は肉体的な負担が大きく、腰痛の原因となってしまいます。
本研究では、足腰が弱くなった高齢者あるいは下肢に軽度の障害を持つ人を対象として、日常生活の中で自立的に移動・移乗動作が行えるように支援する、複ワイヤ駆動方式を用いた自立支援パワーアシスト装置の開発に取り組んでいます。